
Welcome
Welcome to my personal homepage. Please find some information about my research projects and interests, publications, teaching and academic services below.
Research
Projects

Motion Planning for Bertha
Motion planning is key to every automated physical system, and a well investigated subject in
the field of robotics. In the field of automated vehicles, the task is to determine an
appropriate behavior, resulting in a trajectory, i.e. the state of the vehicle as a function of
time. This task is referred to as decision making or motion planning for automated vehicles. The
decision is based on previously acquired knowledge about the environment, such as the drivable
area and detected objects, but also traffic rules.
The key challenges in motion planning for automated driving arise from the collision risk with
other traffic participants. Since human lives are at risk, safety takes the top priority. On the
other hand, over-cautious behavior, sometimes referred to as “driving like a learner”, is not
only inconvenient but can also cause dangerous situations, as this behavior might cause
misunderstanding by humans or entice them to risky overtaking maneuvers, for example.
Thanks to our test vehicle Bertha (image on the left), we are able to evaluate approaches and
algorithms in real traffic on public roads.
Related press releases:
ARD
Tagesthemen
Motus Magazin
Probabilistic Motion Planning for Automated Vehicles
As a prerequisite for their on-road deployment, automated vehicles must show an appropriate and
reliable driving behavior in mixed traffic, i.e. alongside human drivers. Besides the
uncertainties resulting from imperfect perception, occlusions and limited sensor range, also the
uncertainties in the behavior of other traffic participants have to be considered.
Related approaches for motion planning in mixed traffic often employ a deterministic problem
formulation. The solution of such formulations is restricted to a single trajectory. Deviations
from the prediction of other traffic participants are accounted for during replanning, while
large uncertainties lead to conservative and over-cautious behavior. As a result of the
shortcomings of these formulations in cooperative scenarios and scenarios with severe
uncertainties, probabilistic approaches are pursued. Due to the need for real-time capability,
however, a holistic uncertainty treatment often induces a strong limitation of the action space
of automated vehicles. Moreover, safety and traffic rule compliance are often not considered.
Thus, we focus on motion planning approaches are targeted towards the different predominant
uncertainties in different scenarios, while operating in a continuous action space and ensuring
safety.
Related publications:
IV2019
ITSC2019
dissertation
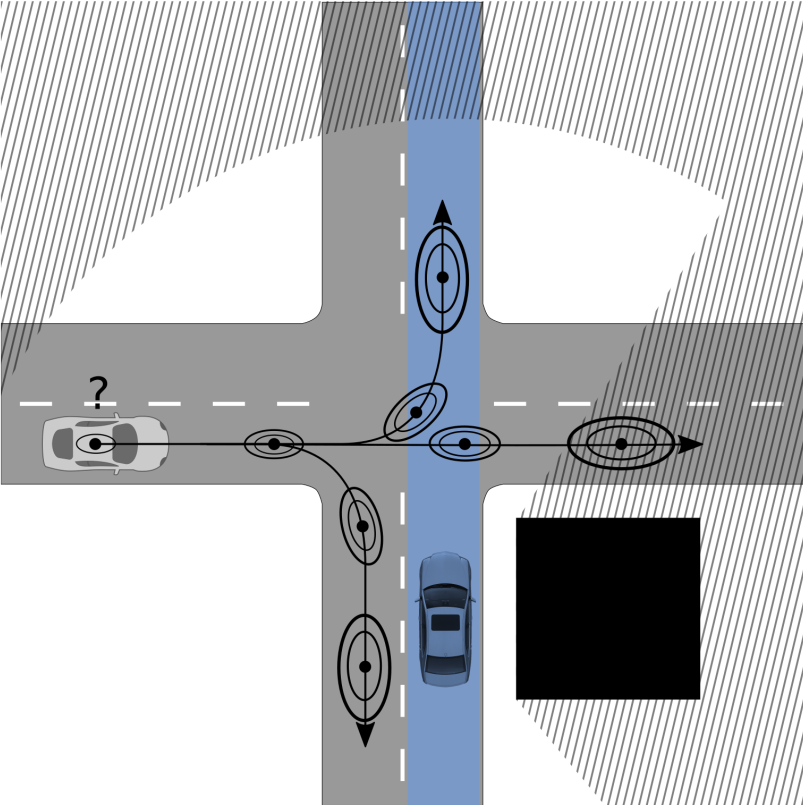
Cooperative Motion Planning in Mixed Traffic
Generating human-like motion in cooperative scenarios with human-driven vehicles is a challenging task. One of the major issues is that most techniques treat the prediction of surrounding vehicles and motion planning as two separate tasks. This way, interactions among traffic participants are neglected. Our work's focus is to explicitly consider these interactions, treating prediction and planning as a joint task and thereby creating cooperative motion plans.
Related publications:
IROS2017-WS
ITSC2018
dissertation

Verifiable Safety in Motion Planning and Decision-Making
Since human lives must never be put at risk, the safety of automated vehicles must be ensured before their on-road deployment. As shown in many exemplary calculations, a validation solely via test drives is not expedient. In order to validate the safety of automated vehicles, formal methods are promising. Here, we focus on analyzing and extending existing concepts such as Responsibility Sensitive Safety (RSS) by Intel/Mobileye and set-based methods as proposed by Matthias Althoff et al. Further, we focus on motion planning and decision making that is safe, yet not over-cautious, since over-cautious behavior might entice human drivers to risky maneuvers (such as overtaking) and thus jeopardize the safety concept.
Related publications:
ITSC2018
IV2019
ITSC2019
dissertation
Inverse Reinforcement Learning from Human Behavior
Many planning problems are formulated as the minimization of a cost function which accounts for
different criteria such as comfort, safety and efficiency. As an alternative to manually tuning
the parameters of the cost function, they can be learned from demonstrations of a human expert
using Inverse Reinforcement Learning. We investigate how demonstrated behavior in highway
driving can be reproduced by the learned cost function.
Furthermore, we created the Interaction Dataset, a dataset that contains human driving, cycling
and walking behavior, along with high-definition lanelet2 maps (see below for details). We now
focus on analyzing this behavior using Inverse Reinforcement Learning, in order to better
understand and predict human behavior, but also to generate human-like behavior.
Software and Datasets
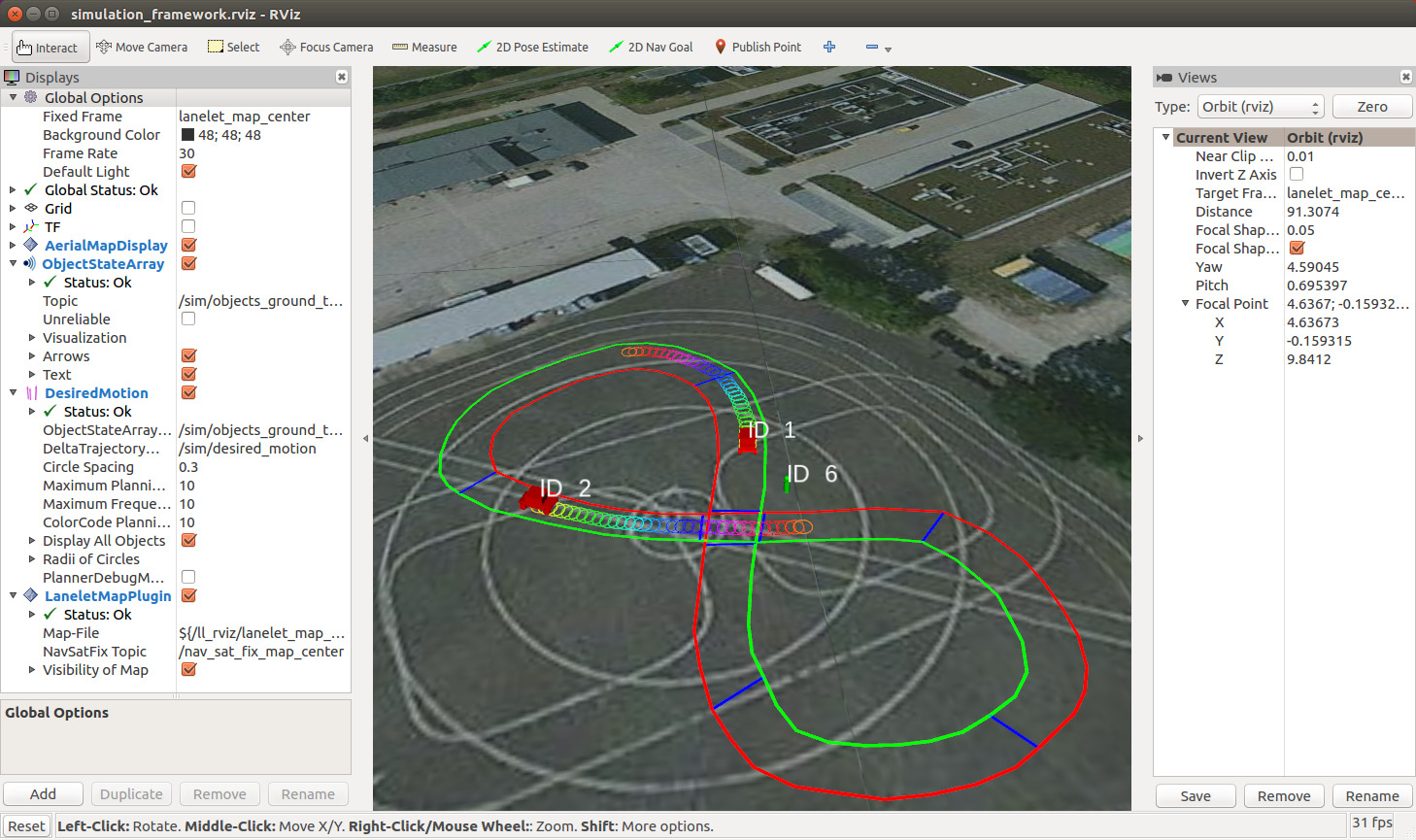
CoInCar-Sim
For cooperative motion planning, interaction between traffic participants is crucial. Consequently, simulations where other traffic participants follow simple behavioral rules can no longer be used for development and evaluation. To close this gap, we implemented a multi vehicle simulation framework. Conventional simulation agents, using a simple, rule-based behavior, are replaced by multiple instances of sophisticated behavior generation algorithms. Thus, development, test and simulative evaluation of cooperative planning approaches is facilitated. The framework is implemented using the Robot Operating System (ROS).
Lanelet2
Lanelet2 is a C++ library for handling map data in the context of automated driving. It is designed to utilize high-definition map data in order to efficiently handle the challenges posed to a vehicle in complex traffic scenarios. Flexibility and extensibility are some of the core principles to handle the upcoming challenges of future maps.
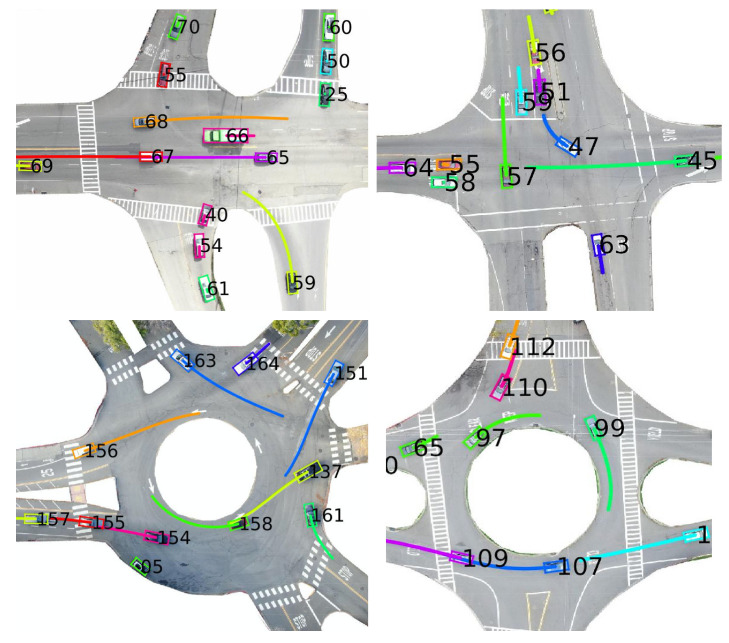
Interaction Dataset
The INTERACTION dataset contains naturalistic motions of various traffic participants in a variety of highly interactive driving scenarios from different countries. The dataset can serve for many behavior-related research areas, such as 1) intention/behavior/motion prediction, 2) behavior cloning and imitation learning, 3) behavior analysis and modeling, 4) motion pattern and representation learning, 5) interactive behavior extraction and categorization, 6) social and human-like behavior generation, 7) decision-making and planning algorithm development and verification, 8) driving scenario/case generation, etc.
Publications
Maximilian Naumann. Probabilistic Motion Planning for Automated Vehicles. Dissertation, Institut für Mess- und Regelungstechnik, Karlsruher Institut für Technologie (KIT), Karlsruhe, 2020. [ DOI | http ]
Maximilian Naumann, Liting Sun, Wei Zhan, Masayoshi Tomizuka. Analyzing the Suitability of Cost Functions for Explaining and Imitating Human Driving Behavior based on Inverse Reinforcement Learning. In Proc. IEEE Intl. Conf. Robotics and Automation, Paris, France, June 2020.
Maximilian Naumann, Hendrik Königshof, Martin Lauer, Christoph Stiller. Safe but not Overcautious Motion Planning under Occlusions and Limited Sensor Range . In Proc. IEEE Int. Conf. Intelligent Vehicles, Paris, France, June 2019. [ DOI | .pdf ]
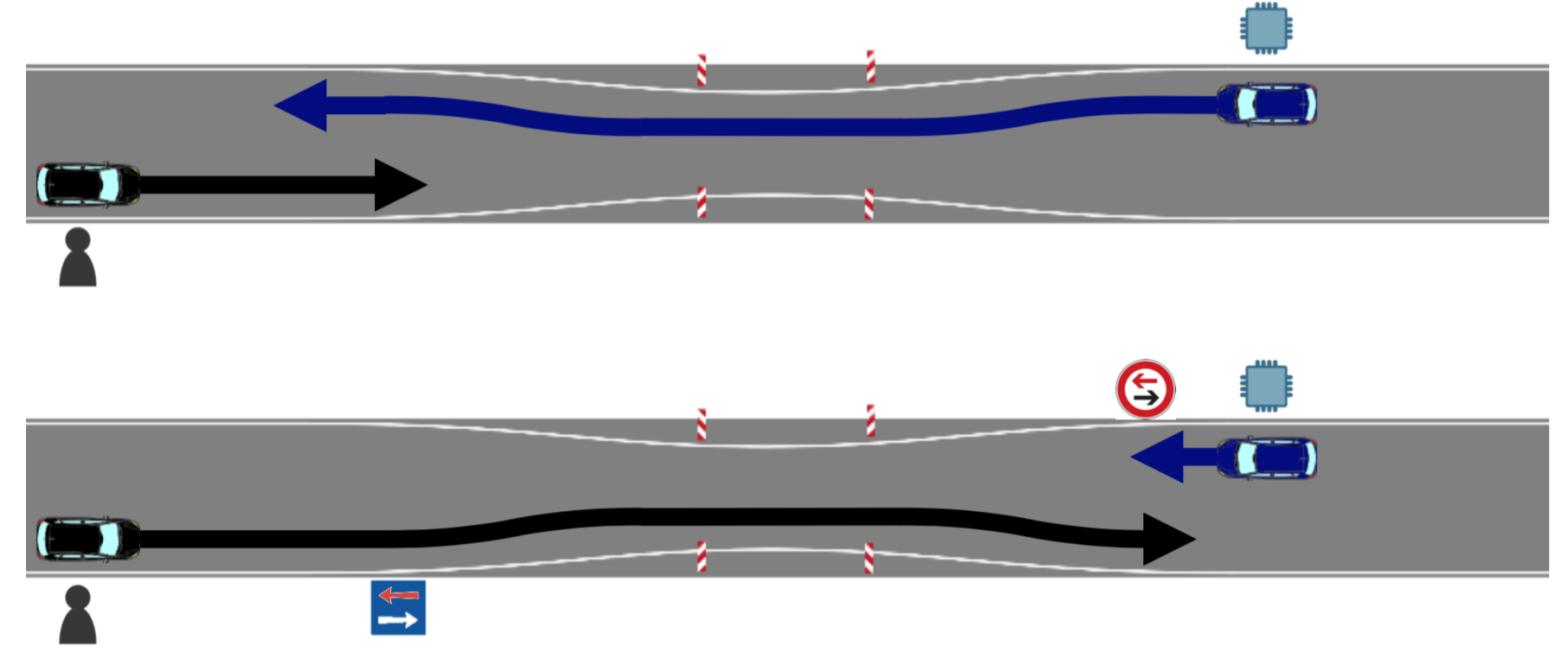
Maximilian Naumann, Hendrik Königshof, Christoph Stiller. Provably Safe and Smooth Lane Changes in Mixed Traffic. In Proc. IEEE Intl. Conf. Intelligent Transportation Systems, Auckland, NZ, Oct 2019. video. [ DOI | .pdf ]
Fabian Poggenhans, Jan-Hendrik Pauls, Johannes Janosovits, Stefan Orf, Maximilian Naumann, Florian Kuhnt, Matthias Mayr. Lanelet2: A High-Definition Map Framework for the Future of Automated Driving. In Proc. IEEE Intell. Trans. Syst. Conf., Seiten 1672--1679, Hawaii, USA, November 2018. [ DOI | .pdf ]
Maximilian Naumann, Fabian Poggenhans, Martin Lauer, Christoph Stiller. CoInCar-Sim: An Open-Source Simulation Framework for Cooperatively Interacting Automobiles. In Proc. IEEE Int. Conf. Intelligent Vehicles, Seiten 1879--1884, Changshu, China, June 2018. [ DOI | .pdf ]
Maximilian Naumann, Martin Lauer, Christoph Stiller. Generating Comfortable, Safe and Comprehensible Trajectories for Automated Vehicles in Mixed Traffic. In Proc. IEEE Intl. Conf. Intelligent Transportation Systems, Seiten 575--582, Hawaii, USA, Nov 2018. [ DOI | http ]
Maximilian Naumann, Piotr Orzechowski, Christoph Burger, Ömer Sahin Tas, Christoph Stiller. Herausforderungen für die Verhaltensplanung kooperativer automatischer Fahrzeuge. In AAET Automatisiertes und vernetztes Fahren, Beiträge zum gleichnamigen 18. Braunschweiger Symposium vom 8. und 9. Februar 2017, Seiten 287--307, Braunschweig, Germany, Feb 2017. ITS automotive nord e.V. ISBN: 978-3-937655-41-3. [ .pdf ]
Maximilian Naumann, Christoph Stiller. Towards Cooperative Motion Planning for Automated Vehicles in Mixed Traffic. In IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems Workshops, Vancouver, Canada, 2017. [ http ]
Eike Rehder, Maximilian Naumann, Niels Ole Salscheider, Christoph Stiller. Cooperative Motion Planning for Non-Holonomic Agents with Value Iteration Networks. arXiv preprint arXiv:1709.05273, 2017. [ http ]
Maximilian Naumann, André-Marcel Hellmund. Multi-Drive Road Map Generation on Standardized High-Velocity Roads using Low-Cost Sensor Data. In Proc. IEEE Int. Conf. Intelligent Transportation Systems, Seiten 113--120, Rio de Janeiro, Brazil, Nov 2016. [ DOI | .pdf ]
Academics
Teaching
- [German] Übungen zu Grundlagen der Mess- und Regelungstechnik (winter term 2016/17)
- Measurement and Control Systems Tutorial (winter term 2016/17)
- [German] Übungen zu Regelungstechnik und Systemdynamik (summer term 2017)
- [German] Messtechnisches Praktikum (summer terms 2017, 2018)
- [German] Rechnergestützte Verfahren in der Mess- und Regelungstechnik (winter terms 2016/17, 2017/18)
- Digital Signal Processing (KSOP technical module) (winter terms 2016/17, 2017/18)
Academic Services
-
Reviewer
- IEEE Intelligent Vehicles Symposium (IV)
- IEEE Intelligent Transportation Systems Conference (ITSC)
- IEEE International Conference on Robotics and Automation (ICRA)
- IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
- IEEE Intelligent Transportation Systems Magazine (ITSM)
- IEEE Transactions on Intelligent Vehicles (T-IV)
- International Journal of Geographical Information Science (IJGIS)
- Transportation Research: Part C (TR_C)
- Organizer/Chair
- Special Session "Cooperatively Interacting Automobiles (I)" at IEEE ITSC 2018
- Workshop "Benchmarking Probabilistic Behavior Prediction in Highly Interactive Driving Scenarios" at IEEE IV 2020
- Workshop "Probabilistic Prediction and Comprehensible Motion Planning for Automated Vehicles" at IEEE ITSC 2020
- Workshop “Ensuring and Validating Safety for Automated Vehicles” at IEEE IV 2021
- Workshop "From Benchmarking Behavior Prediction to Socially Compatible Behavior Generation in Autonomous Driving" at IEEE IV 2021
- Workshop "Probabilistic Prediction and Comprehensible Motion Planning for Automated Vehicles – Approaches and Benchmarking" at IEEE ITSC 2021
- Workshop "Automated Vehicle Safety: Verification, Validation and Transparency" at IEEE ITSC 2021
- Chairman of PhD student convent, Department of Mechanical Engineering at KIT (2017-2021)